
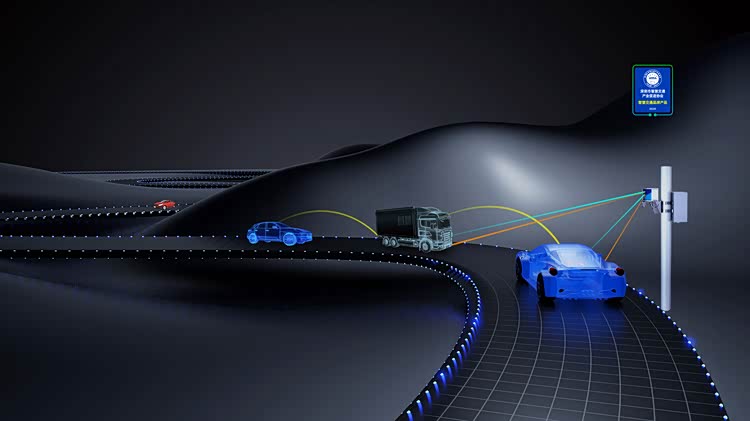
在智能驾驶技术发展进程中,单一传感器难以满足复杂环境感知需求,多传感器融合技术成为提升自动驾驶安全性与可靠性的核心方案。该技术通过整合激光雷达、摄像头、毫米波雷达等多源数据,实现环境信息的互补与冗余,突破单一传感器的性能局限。
激光雷达以其高精度三维建模能力,可实现对周围物体的精准定位与测距,在夜间、雨雪等恶劣天气下仍能稳定工作。禾赛科技的AT128 激光雷达,凭借 128 线高分辨率,最远探测距离达 200 米,角分辨率低至 0.16°×0.2°,为自动驾驶提供高精度环境感知数据。但激光雷达存在数据稀疏、语义信息缺失的问题,需与摄像头融合弥补不足。
摄像头利用计算机视觉技术,具备丰富的语义识别能力,能够识别交通标志、车道线及其他交通参与者的行为意图。特斯拉的纯视觉方案通过8 个摄像头构建 360° 视觉感知系统,结合神经网络算法,实现物体检测与路径规划。然而,摄像头受光照条件影响大,在逆光、暗光环境下性能显著下降。
毫米波雷达凭借穿透性强、测距测速精准的特点,成为全天候感知的重要补充。其可实时监测目标物体的速度与相对距离,在自适应巡航(ACC)、自动紧急制动(AEB)等功能中发挥关键作用。但毫米波雷达无法获取物体形状与纹理信息,需与其他传感器协同工作。
多传感器融合主要分为数据层、特征层与决策层融合。数据层融合直接处理原始传感器数据,信息损失最小但计算复杂度高;特征层融合提取各传感器特征后进行融合,可降低计算量;决策层融合则基于各传感器独立决策结果进行综合判断,鲁棒性强但存在信息丢失风险。实际应用中,常采用多层融合策略,如蔚来ET7 通过激光雷达点云与摄像头图像的特征级融合,使目标检测准确率提升至 98.7%。
随着人工智能算法与边缘计算技术的进步,多传感器融合将向实时性更强、鲁棒性更高的方向发展,为L3 级以上自动驾驶提供坚实的感知基础。

京ICP备09113703号-1
信息网络传播视听节目许可证: 0110553
广播电视节目制作经营许可证
公司名称:北京车之家信息技术有限公司
中央网信办违法和不良信息举报中心
违法和不良信息举报电话:400-868-5856
举报邮箱:jubao@autohome.com.cn