当下智能驾驶赛道竞争白热化,不少品牌在实验室或封闭道路中展现出惊艳的辅助驾驶能力,但驶入真实城市路况后,却频繁出现误判、迟响应等“水土不服”问题。而乐道汽车近期推送的Coconut 2.1.0年终版本更新,凭借端到端技术在行车、泊车、主动安全三大领域的全面落地,给出了破解这一行业痛点的新方案。从端到端AEB的数十万次避险实测到城区无图领航的流畅体验,乐道正用技术实力缩小智驾从实验理想路段到现实复杂路段的差距。
核心破局:端到端架构重构智驾决策逻辑
多数品牌智驾系统陷入“实验室强、现实弱”困境,核心原因在于传统模块化架构的局限性。这类系统需人工拆解感知、定位、决策等多个模块,模块间信息传递易损耗,面对突发路况时,固定规则难以覆盖所有场景。乐道的破局关键,在于采用端到端技术重构智驾核心逻辑。


此次Coconut 2.1.0版本完成了端到端技术的全场景覆盖,加上此前1.2.0版本交付的端到端AEB,乐道已实现行车、泊车、主动安全三大领域的端到端架构化。与传统模块化方案不同,乐道端到端系统如同为车辆装上“集成式大脑”,可直接处理传感器原始数据并输出控制指令,省去中间模块适配环节,更接近人类驾驶“观察-判断-操作”的连贯逻辑。这种架构优势在真实路况中尤为明显,无需依赖高精地图,凭借实时感知就能应对复杂路网,真正实现“有路就能开”。
场景落地:三大端到端功能适配真实出行需求
乐道端到端技术的价值,最终体现在真实出行场景的精准适配中。Coconut 2.1.0版本的两项核心AD更新,让技术优势转化为用户可感知的驾驶体验。在城区领航场景中,端到端系统大幅提升了无保护左转、路口通行的成功率,面对城中村窄巷、人车混行等复杂路况,能实现流畅绕行,加减速控制的舒适性甚至超越普通人类司机。有实测数据显示,其城区NOA平均接管间隔超45公里,红绿灯识别准确率达99.2%,充分验证了真实路况的可靠性。
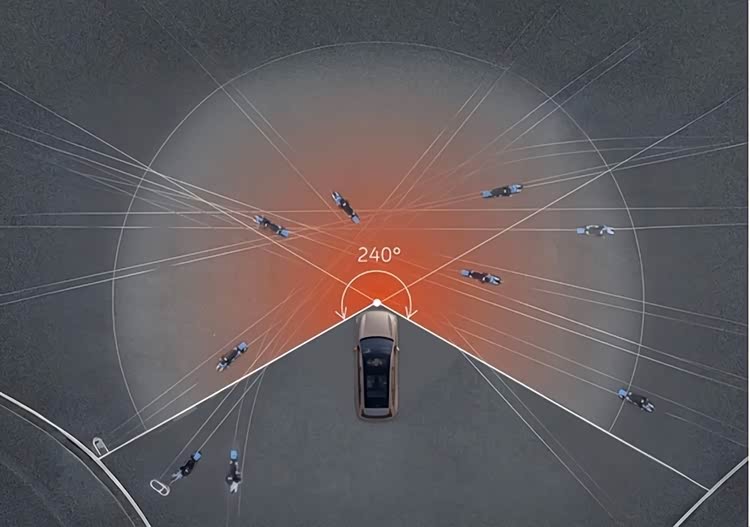
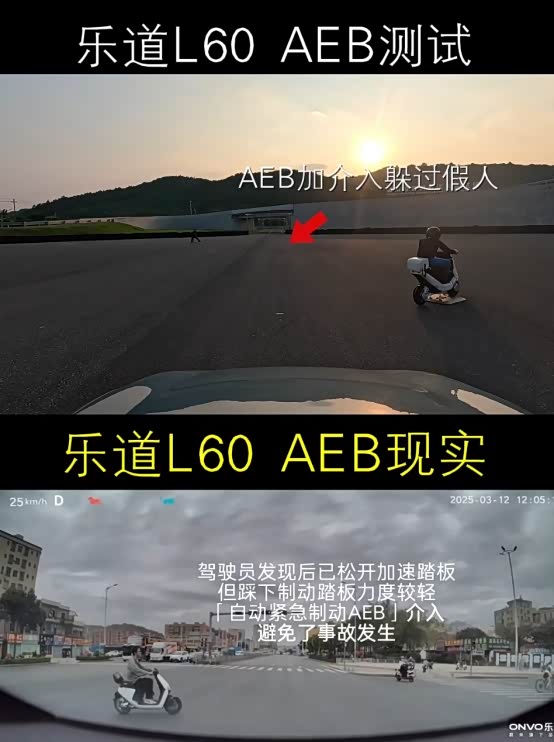
在泊车场景中,乐道端到端泊车辅助作为行业唯二的量产方案,凭借超强感知能力实现“可见即可选,选中即可泊”,即便远距离目标车位也能自主规划轨迹抵达。而在主动安全领域,端到端AEB构建的240度超广防护圈,能精准应对路口非机动车横穿、斜穿等高频风险场景。截至2025年11月,该系统已成功为用户化险为夷超22万次,用实测数据印证了技术的安全价值。
细节补位:功能迭代筑牢全场景安全防线
乐道对真实出行体验的考量,不仅限于核心智驾功能,更延伸到细节安全场景。Coconut 2.1.0版本新增的四门开门预警影像功能,实现前排中控屏与后排控制屏的实时影像同步,能清晰显示开门后的侧后方路况,从源头避免“开门杀”风险。


值得关注的是,此次更新还强化了智能服务体验,在原有麦当劳点餐功能基础上新增肯德基智慧点餐,依托“小乐GPT”的自然语言理解能力,支持套餐组合、优惠匹配等个性化需求,配合车速取、沿街取服务,实现不下车即取即走。这些功能迭代虽非核心智驾范畴,却从用户日常出行场景出发,进一步完善了智能出行生态,也让乐道的产品智能体验稳居行业第一梯队。
写在最后
从技术架构重构到场景精准落地,再到细节体验补位,乐道通过年底这波Coconut 2.1.0版本的全面更新,让端到端技术真正服务于真实出行需求。当智驾竞争从“参数比拼”转向“体验较量”,乐道的探索不仅破解了行业普遍的“水土不服”难题,更让用户感受到智能驾驶的安全与便捷。对于消费者而言,这样的技术迭代无疑让智能出行更值得期待,也为行业树立了从实验室走向现实路况的标杆。
