
如果有一天,你坐进车里,发现方向盘居然开始自己转动,而你只需要说一句“回家”,它就能从办公室的固定车位一路开到你家门口的停车位——你会兴奋,还是会下意识地攥紧扶手?

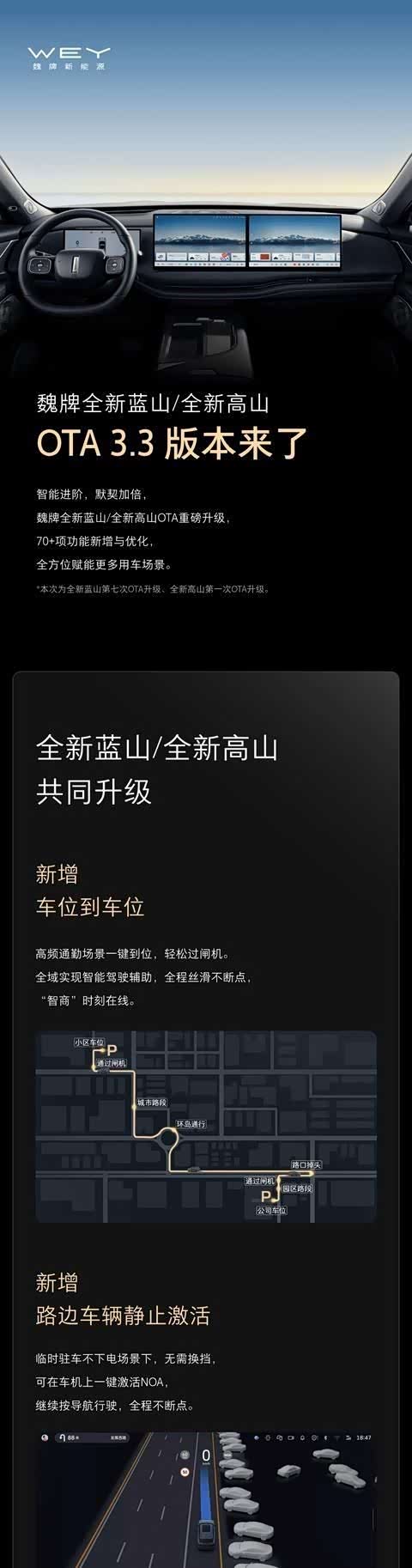
这听起来像科幻电影的桥段,但在2025年的今天,魏牌通过一次OTA升级,把这种“全链路自动驾驶”的体验,悄悄塞进了用户的日常通勤里。不是测试,不是限定场景,而是实实在在推送到车主车机系统里的新功能:车位到车位的全场景智能辅助驾驶,正式上线OTA 3.3版本。

我们过去谈“智能驾驶”,总绕不开高速NOA——高速领航辅助。它确实解决了长途驾驶的疲劳问题,但真正让人头疼的“最后一公里”呢?小区里找车位、地库绕圈、窄路会车、倒车入库……这些琐碎又高压力的场景,才是多数人每天的驾驶痛点。魏牌这次的OTA 3.3,恰恰把火力对准了这个“城市驾驶黑洞”。

它不再只是“高速能自己开”,而是打通了从起点车位到终点车位的完整闭环。你停好车,系统自动记忆终点车位;出发时,车辆自主驶出地库,汇入城市道路,识别红绿灯、避让行人、变道超车,最后精准停入目标车位。整个过程,驾驶员可以完全不碰方向盘——当然,法规和安全机制仍在,随时可接管。

这背后,是感知系统和决策算法的双重跃迁。据魏牌官方披露,OTA 3.3升级了BEV+Transformer融合感知架构,视觉与雷达数据的融合精度提升了40%。更关键的是,引入了Occupancy Networks(占据网络),让车辆不再只是识别“这是车、那是人”,而是理解“这块空间能不能过”。比如面对一辆半遮挡的电瓶车,系统能判断其运动趋势和占据区域,从而提前避让——这在老系统里,往往会导致急刹或误判。

有意思的是,这种“端到端”式的全链路能力,正在模糊“辅助驾驶”和“自动驾驶”的边界。有人会质疑:这不就是把高速NOA和自动泊车拼在一起吗?但真正的难点,其实在于场景的连续性与决策的连贯性。比如,车辆从地库驶出时,要瞬间适应光照变化、识别出口栏杆、预判外部车流;进入城市道路后,又要处理非机动车突然切入、施工围挡绕行等复杂工况。这些“边界场景”的处理能力,才是技术含金量的试金石。

不妨做个对比:三年前,我们还在为“能不能自动变道”争论;两年前,城市NOA成了高端车型的标配;而今天,魏牌直接把“起点到终点”的完整动线交给系统。这背后,是车企从“功能堆砌”转向“体验闭环”的战略转变。用户不再关心你有多少个传感器,他们只在乎:“我能不能更轻松地到达目的地?”

但问题也随之而来:当车辆越来越“聪明”,驾驶员会不会越来越“懒”?当系统接管了99%的驾驶任务,那剩下的1%突发情况,人类还能不能及时反应?我朋友上周就遇到一件事:他的新车在地库出口突然刹停,原因是系统误判前方静止的花坛为障碍物。他本能地踩下油门,结果系统仍在制动——那几秒的“人机博弈”,让他后背出了层汗。
这提醒我们:技术可以追求无缝,但责任边界必须清晰。目前所有L2+级辅助驾驶,法律上仍要求驾驶员全程监控。可当系统表现越可靠,人的注意力就越容易松懈。这像不像一个悖论?我们训练机器更像人,却又要求人在机器犯错时,瞬间切换回“顶级驾驶员”模式。

回到最初的问题:当车能自己从车位开到车位,我们是该欢呼,还是该警惕?或许答案不在技术本身,而在我们如何使用它。魏牌OTA 3.3的意义,不只是功能升级,更是把“全场景智能驾驶”从概念拉进了现实。下一步,不该是让车做得更多,而是教会人与系统如何更好地共驾。

未来五年的关键,可能不是谁的NOA更流畅,而是谁能真正解决“信任断点”——在系统说“我来开”和“你来接管”之间,建立一条平滑、可预测的信任通道。

那么问题来了:当你的车比你还懂怎么停车,你还会享受驾驶的乐趣吗?还是说,那份乐趣,已经悄然转移到了“安心放手”的那一刻?

京ICP备09113703号-1
信息网络传播视听节目许可证: 0110553
广播电视节目制作经营许可证
公司名称:北京车之家信息技术有限公司
中央网信办违法和不良信息举报中心
违法和不良信息举报电话:400-868-5856
举报邮箱:jubao@autohome.com.cn