
最近看到百度放弃多传感器路线,转投纯视觉,震撼还是蛮大的。
毕竟长期以来,多传感器、多激光雷达一直都是L4自动驾驶公司的标签。

一方面,L4要和民用L2做出差异,吸引投资;另一方面,不同特性传感器叠加,可大幅减少暴雨、浓雾等恶劣环境,对感知能力的影响,也很被L4公司看中。
更何况,百度还是L4公司里的保守派,连给 极越01(参数|询价)提供的第一版PPA智驾辅助系统,都用了高精地图。
李彦宏:成本限制规模
百度自动驾驶路线变动的消息,来自于李彦宏在Q2高管会上的演讲:
“现在我们认识到,纯视觉方案在成本和规模化上更有优势。我们要果断调整方向,全面转向纯视觉技术,以降低成本、加速自动驾驶的规模化运营。”
“如果能尽早地做出规模来,做出用户口碑来,能够跑通的话,我们的技术路线就有时间迭代到最终的纯视觉路线。

这里面透露出两个问题,第一,萝卜快跑车少,没多少人体验过;第二,放弃直接式L4路线,改用类似于民用L2的渐进式路线。
先聊第一个问题,李彦宏给出的原因是“贵”。
按照他的说法,激光雷达与计算平台占整车成本的60%(约18万元),持续运营5年才能摊薄投入。
另外,大部分运营区域的Robotaxi还需要安全员,而在萝卜快跑中,安全员的薪资直接占了运营收入的45%。

目前,颐驰06已经开始投放,但车队主力还是四、五代车,算下它们的成本:
- 六代车颐驰06成本25万元(4个长距离激光雷达+4个补盲激光雷达);
- 五代车Apollo Moon成本48万元;
- 四代车红旗EV没有公布,但百度在发布五代车时,曾表示是行业平均成本的三分之一。
注意!百度公布的是成本,而不是加上利润的车辆售价。
比如,特斯拉Robotaxi所采用的Model Y,国内起步价是26.35万元。根据财报,特斯拉今年一季度整车毛利率有16.3%。
同样的预算,单车成本越高,投放数量就越少。
密度高,不如运营范围大
李彦宏谈规模的时候,还提到了用户口碑。而用户口碑,需要来通过体验过萝卜快跑的人建立。
但目前,萝卜快跑的运营范围十分有限,只能在极少城市的固定区域通行。
限制萝卜快跑无法像传统出租车到处跑,除了审批的因素外,高精地图的影响也不小。
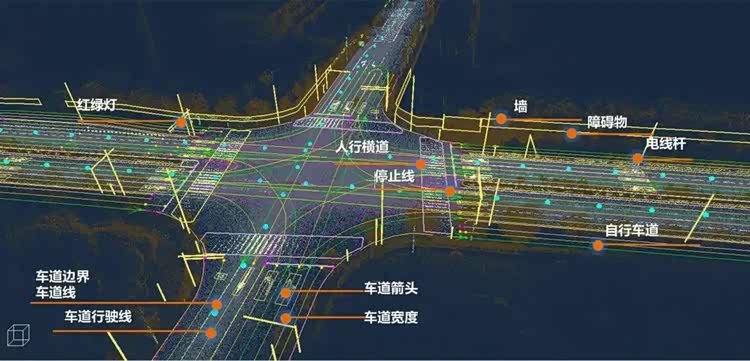
高精地图有别于导航地图,是一种精确到厘米级,几乎包含所有肉眼可见道路和路侧信息的高丰富度地图。比如,车道数量、各车道通行方向、长度、坡度、路牌等。
根据《智能网联汽车高精地图白皮书》,厘米级地图的测绘效率约为每天每车100公里道路,成本达每公里千元左右。
更关键的是,高精地图不能像导航地图采集一遍就结束。它在自动驾驶系统里,扮演的是传感器的角色,是车辆获取周围环境的重要渠道。
所以,高精地图有高鲜度的需求,需要高频的更新,一直重复采集。这不仅成本高昂,也使得它无法像导航地图一样,做出全国高精地图。
目前的L4自动驾驶公司,都是先确定运营区域,再采集或购买对应区域的高精地图。
因此,即使哪一天被允许全国运营,萝卜快跑也很难快速扩大服务范围。
这同样也是华为、蔚小理等新势力,放弃高精地图方案,转投无图(轻地图)的原因。
不再直达L4
第二个问题,百度放弃直接式L4路线,改用类似于民用L2的渐进式路线。
至今为止,L4自动驾驶公司坚持多传感器方案,一个重要理由就是通过不同优劣势的传感器组合,可以在各种恶劣环境里,都能得到尽可能好的感知能力。
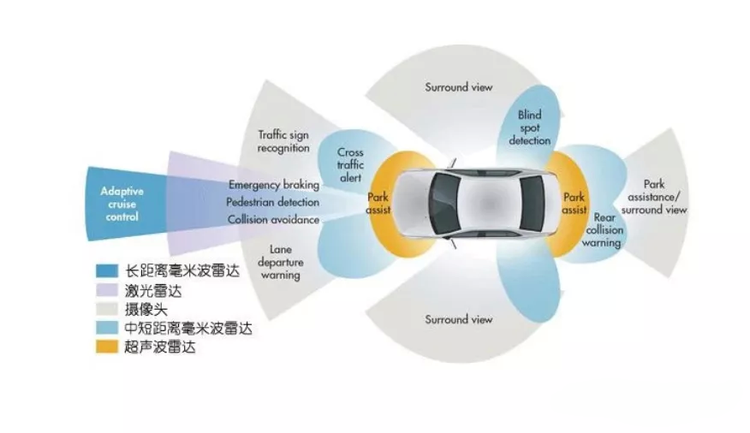
比如,摄像头在黑夜识别能力不佳,但激光雷达和毫米波就不受影响;摄像头和激光雷达的穿透能力会被雨雾衰减,但毫米波雷达不受影响。
这也确实是保证L4系统能“完全自主地完成驾驶任务并监控驾驶环境,无需人类驾驶员的干预”的有效方案。
和L4不同,乘用车所采用的L2智能驾驶辅助系统,如今却逐步舍弃了激光雷达。
这是因为L2智能驾驶辅助系统允许失误和被接管,在视觉算法能力逐步提高后,摄像头提供的信息就已经能覆盖95%以上的场景。至于一些极端环境,可以通知驾驶员接管,或者禁止被启动。
提升、失误、能力逐步硬件无法直达L4,这对于L2智能驾驶辅助系统而言,都是被允许的。
而且,L2车辆销售越多,就相当于采集车队规模越大,获得的优质数据也就越多,进而让系统能力像混雪球般壮大。
李彦宏选择放弃直达L4,也是因为意识到了渐进式路线成长速度的可怕:“如果我们不能迅速占领市场,迅速打磨技术,等到有一天特斯拉这种纯视觉路线真正成熟的时候,可能我们也就没有机会了。”

可惜的是,曾经最早一批实现全国都能开,曾是国内L2渐进式方案头部的极越汽车,已经在去年年底被解散。

京ICP备09113703号-1
信息网络传播视听节目许可证: 0110553
广播电视节目制作经营许可证
公司名称:北京车之家信息技术有限公司
中央网信办违法和不良信息举报中心
违法和不良信息举报电话:400-868-5856
举报邮箱:jubao@autohome.com.cn