
2732英里,相当于北京到乌鲁木齐往返一趟。60多个小时连续运行,相当于看完30部电影的时间。
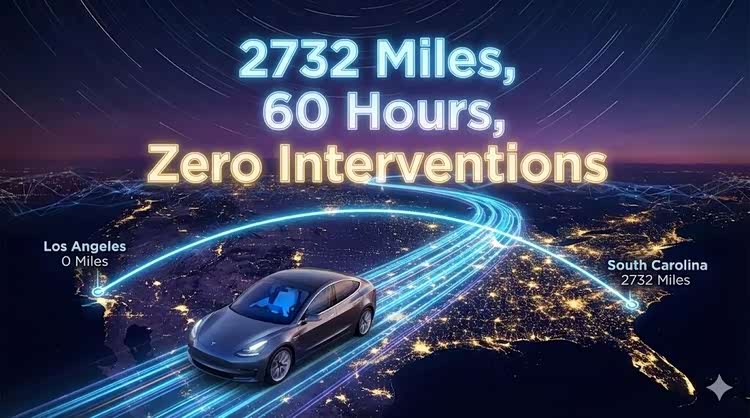
零接管。
一辆 Model 3(参数|询价)从洛杉矶跑到南卡罗来纳,全程FSD,没有人工干预。不是官方演示,不是实验室测试,是普通车主Davis Moss在真实路况下完成的记录。马斯克转发祝贺,特斯拉官方账号确认,社区沸腾。
英伟达机器人业务负责人Jim Fan说FSD v14通过了”物理图灵测试”,开起来已经分不出是人还是机器。
这算自动驾驶的里程碑…吗?
零接管横穿美国,到底有多难?这距离真正可用的自动驾驶,还有多远?
一、”零接管”到底有多难?
2732英里,听起来只是个距离数字。但放到自动驾驶系统里,这个数字的含义完全不同。
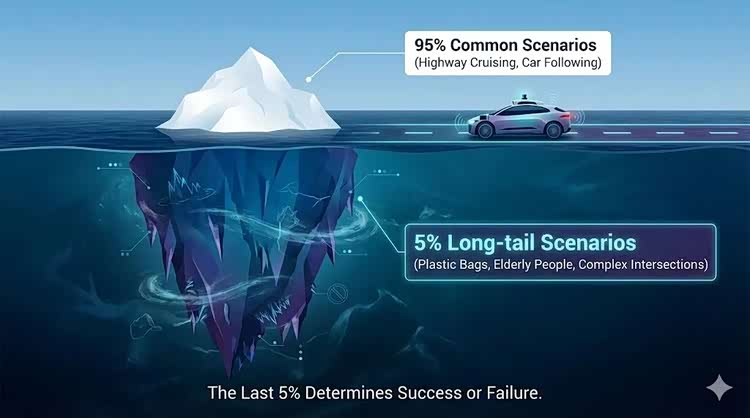
自动驾驶有个残酷的规律:最后5%的场景,占据95%的开发难度。
前95%的场景是什么?高速巡航、跟车、变道、识别红绿灯,这些基础功能,行业里早就不是问题。十年前的Autopilot就能在高速上跑得八九不离十。
难的是剩下那5%。
- 一只塑料袋在路中间翻滚。
- 一个老太太推着婴儿车站在人行道边缘。
- 前车突然急刹又松开。
要不要躲?要不要让行?是误操作还是真有情况?
这些场景,人类司机可能一辈子遇不到几次,但自动驾驶系统跑2700多英里,就得把这些“小概率事件”全遍历一遍。每一个犹豫、每一次判断失误,都会触发接管。
更残酷的是,这些场景没有标准答案。
- 塑料袋可以碾过去,但万一是个纸箱呢?
- 老太太可能只是在等人,但万一她下一秒真的推车过马路呢?
- 前车可能是误踩刹车,但万一前面真有行人呢?
人类司机怎么处理?靠经验、靠直觉、靠对当下情境的综合判断。FSD要做到零接管,就得在这些没有明确规则的场景里,表现得像个有经验的老司机,不是机械地执行规则,而是理解情境。
2732英里意味着什么?按美国路况,高速+城市混合路段,平均每英里可能遇到2-3个需要决策的场景。2700英里就是5000-8000次决策。每一次都不能出错。
这不是技术演示,不能重来。错一次,这个”零接管”的记录就没了。
还有一个容易被忽视的点:连续运行60多个小时不出错。
软件工程师都知道,系统稳定性和运行时长强相关。跑1小时不崩溃,和跑60小时不崩溃,完全是两回事。这就像让一个程序员连续写代码60小时不出bug,中间不能重启、不能debug、不能回滚。
内存泄漏、传感器漂移、计算资源争抢,这些在短时间测试里看不出来的问题,长时间运行就会暴露。特斯拉的FSD要在2天多的时间里,持续处理摄像头数据、做推理决策、控制车辆,中间还要经历白天黑夜、晴天雨天、城市高速的切换。
二、FSD做对了什么?
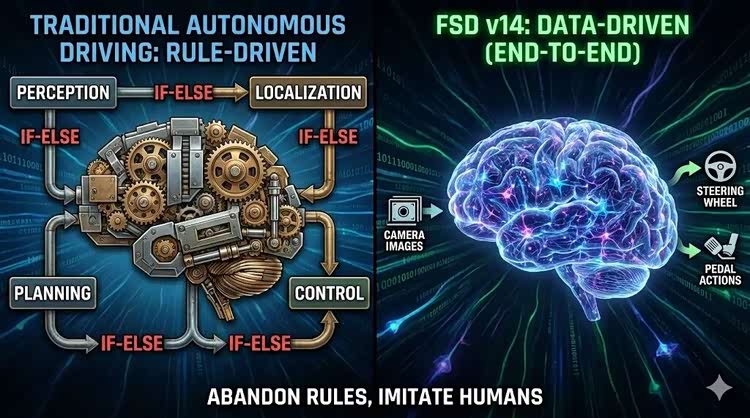
FSD v14和之前的版本最大的区别,是彻底抛弃了规则。
传统自动驾驶系统怎么工作?感知模块识别物体,定位模块确定位置,规划模块根据规则生成路径,控制模块执行操作。每个模块独立开发,中间用大量if-else连接。
这套架构的问题在于:
规则永远写不完。
遇到塑料袋该怎么办?写个规则。遇到纸箱、半个纸箱、被压扁的纸箱……规则永远写不完。
规则写不完,数据可以。
FSD v14换了个思路:不写规则,直接学人怎么开车。
端到端神经网络,输入是摄像头画面,输出是方向盘转角和油门刹车力度。中间没有显式的物体识别、没有路径规划、没有if-else判断。所有决策都在一个神经网络里完成。
效果是什么?Moss跑了2732英里,零接管。Jim Fan说已经分不出是人还是机器在开。
FSD v14在路口的表现,不是机械地”检测到行人-停车-等待-启动”,而是会像人一样,慢慢往前蹭一点,观察一下,确认行人不会过马路了,再平滑加速通过。
这种微妙的试探性动作,很难用规则写出来,但人类司机天天在做。
这背后是特斯拉的数据飞轮。
400多万辆车在路上跑,每天产生海量驾驶数据。按业内估算,每辆车每天产生几个GB的数据,整个车队一天就是PB级别。
哪些场景人类接管了?接管前后车辆状态是什么样的?这些数据回传到特斯拉,标注后喂给神经网络训练。网络学会了处理这个场景,推送到车队,继续收集下一批corner case。
循环往复,越跑越聪明。
这就是为什么FSD的进步是非线性的。v13到v14,从技术架构上看没有革命性变化,但体验上是质变。因为神经网络的能力不是设计出来的,是喂出来的。
数据量到了某个临界点,系统突然就”开窍”了。
Moss这次横跨美国,用的是v14.2.1.25,一个小版本号。但就是这个小版本,把FSD从”能用但需要盯着”推到了”可以放心让它开”。
差的不是代码,是数据。
三、从”能跑”到”能用”还有多远?
零接管横跨美国,确实是个了不起的成就。但距离真正可商用的自动驾驶,还隔着一道鸿沟。
先说可靠性。
自动驾驶的可靠性要求,是用”每X英里一次接管”来衡量的。人类司机的致命事故率,大概是每1亿英里一次。要达到L4级别的商用标准,自动驾驶系统的接管率要降到人类水平以下.也就是说,至少要跑几千万英里,才能积累足够的统计显著性。
2732英里的零接管,放到这个尺度下,样本量太小。
一次成功,不等于稳定复现。Moss这次跑成了,那下一个车主呢?同样的路线,同样的v14.2,能保证也是零接管吗?
更关键的是,这次横跨是在相对理想的条件下完成的。美国的州际高速,路况好到什么程度?标线清晰、路面平整、交通规则执行严格,这是全球自动驾驶最友好的环境之一。换到中国的城市道路,电动车横穿、行人闯红灯、施工路段没有标线,FSD还能保持同样的表现吗?
特斯拉自己也很清楚这一点。FSD的全称是”Full Self-Driving (Supervised)”,括号里那个”Supervised”不是谦虚,是法律要求。这套系统的定位是L2+,驾驶责任还在人,出了事故车主担责。
L2和L4的区别,不是技术能力的差距,是责任主体的鸿沟。
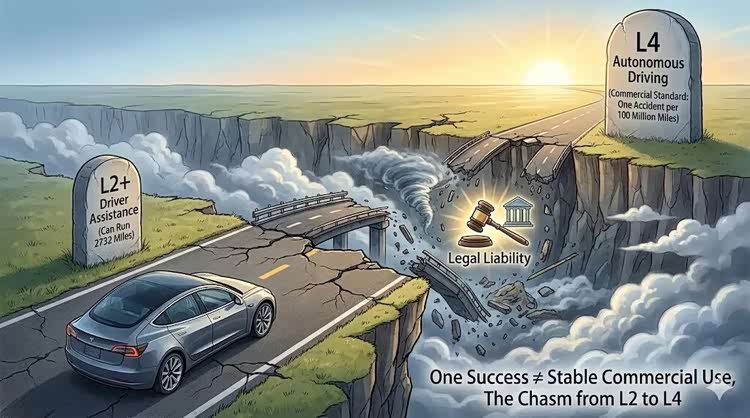
L2是辅助驾驶,人必须盯着,出事车主担责;L4是自动驾驶,系统承诺不会失效,出事厂商担责。这意味着厂商要对系统的每一个决策负法律责任,要保证在规定场景下的失效率低于某个阈值,要通过严格的安全认证。
FSD现在能跑2700英里零接管,但特斯拉敢承诺”在任何天气、任何路况下都能这样跑”吗?所以,它只能是L2。
还有一个现实问题:个体案例和规模化部署是两回事。
Moss是个重度用户,跑FSD已经累计超过1万英里,对系统的特性非常熟悉。他知道什么场景下FSD可能犹豫,知道怎么提前准备好接管。这种”人车磨合”的状态,普通用户能达到吗?
一个刚拿驾照的新手,第一次用FSD就上高速,遇到大货车并线,FSD犹豫了0.5秒,新手会不会慌?会不会直接接管?甚至会不会因为不知道怎么接管而出事?
特斯拉的车主群体整体驾驶水平较高,对新技术接受度也高,
这是一个筛选后的样本。
真正的大规模商用,要面对所有类型的用户.包括那些不看说明书、不理解系统边界、盲目信任技术的人。
零接管横跨美国,证明了FSD在理想情况下的能力上限。但商用系统要保证的,是最差情况下的能力下限。
回到最初的问题:零接管横跨美国,算里程碑吗?
算。
证明了端到端神经网络在长距离、多场景下的一定程度的稳定性。
但,可能才刚刚开始。甚至,这条路最后走不走得通,先在也不好下断论。

京ICP备09113703号-1
信息网络传播视听节目许可证: 0110553
广播电视节目制作经营许可证
公司名称:北京车之家信息技术有限公司
中央网信办违法和不良信息举报中心
违法和不良信息举报电话:400-868-5856
举报邮箱:jubao@autohome.com.cn