
整个自动驾驶行业正走在由高级辅助驾驶向上跨越的节点上。
自主泊车(AVP)便是首当其冲的场景之一。在功能上,AVP属于泊车辅助系统、ADAS(高级自动驾驶辅助系统)功能的升级;在技术上,则属于低速L4级自动驾驶。从自动驾驶角度而言,封闭围栏内的低速行驶是业界公认的可以优先实现大规模商业化落地的场景,且暂时不会遇到法律法规的阻碍,AVP功能也就成了实现L4级自动驾驶的必经之路。
由此,主流Tier 1和车厂提出AVP将大概率率先打破城市空间中,乘用车高级别自动驾驶的量产和商业化僵局。随后戴姆勒、博世等巨头纷纷发布了演示Demo或是初步合作方案。
于是,向来走在技术先锋位置的科技公司们开始瞄准大厂公布的量产时间,不约而同地为其奉上自家解决方案。自动驾驶技术公司Momenta就是其中一员。

真实停车场景比想象中复杂
7月11日,该公司正式公布了自主泊车方案Mpilot Parking的技术Demo。
车云菌通过实际试乘了解到,这套Parking解决方案可以实现从停车场入口到指定或任意车位的自主泊车,以及从车位到指定地点的远程召唤功能。用户在手机端点选指定车位后,车辆可自行从地上停车场入口下坡,完成泊车期间的一系列功能;在取车时,用户可以由远程召唤车辆来到指定地点,驾驶员上车后自主驶出停车场。
换句话说,该方案基于单车智能,能够完成跨层泊车、智能绕行、避让车辆行人、在线寻位、智能召唤等几项操作。
然而要想让这件事真正变现,仍有相当长的一段路要走,尤其是针对前装乘用车部分。“把功能做出Demo相对容易,但是要想把功能做好,往量产方向走的话,需要解决很多问题。”Momenta合伙人兼研发总监夏炎说道。
在真实停车场景中,往往会出现各种情况。由于不是结构化道路,车辆要面对复杂的人流、车流,如行人穿行、车辆占道、路口错车、突然出车等。这就要求一个系统必须拥有处理复杂场景的能力,能够实时捕捉周围车辆状态和障碍物动态。
Mpilot Parking采集于苏州办公室地下约500平米的停车场。在实际采集过程中会发现,在地库中车辆行驶空间相对较小,车辆之间也存在严重的遮挡情况。为了避免因自动驾驶车辆无法处理会车、逆行、占道等情况而引起交通拥堵,就需要借助周边场景的呈现进行智能绕行、用视觉传感器进行3D感知、同时针对遮挡场景做到“以小见大”。
而除了侧向车位之外,Momenta面对的还有中国特色的狭小车位。要想精准泊位,具体来说,自动驾驶车辆首先需要判断出车位的宽度,依赖高精地图进行实时定位与车位识别。
高精地图是规模化能力的关键
显而易见,这家初创企业是绝对的高精地图忠实拥趸。
在自主泊车过程中,自动驾驶车辆通过预先建好的停车场高精度地图,可以获取该停车场所有的车位信息。车辆在行驶过程中,融合环视感知以及超声波雷达感知的结果,对车位空闲状态作出识别,自动判断所经过的车位是否可泊入。
相比昂贵的激光雷达建图,Momenta选择了视觉为主的方案实现自动化建图。建图采集系统使用四路环视鱼眼相机、消费级IMU及轮速等传感器。在建图过程中,通过深度学习算法提取视觉语义特征,使用SLAM技术自动生成基于语义的高精度地图。夏炎称,整个系统可进行云端和车端自动建图,精度达到10cm级别。
“自动建图的能力,是Mpilot Parking规模化可量产的关键。”车云菌了解到,Momenta单车绘制地图有两种途径:团队专业建图车队或是用户使用量产车辆自主建图。早前公司已获得电子地图甲级测绘资质,可以针对开放的停车场进行建图并完成验证工作,以保障产品可靠性与稳定性,后续再通过众包的方式实现快速规模化的建图和地图更新。
由于地图采集系统、建图系统和定位系统均基于同一套平台打造,车辆在进行定位时,如果发现真实环境和地图无法匹配时,就可以验证地图的准确性并及时进行更新。这就意味着,每个搭载Mpilot Parking的车辆既是高精度地图的使用者,又是贡献者。
在这种情况下,Momenta提出:“当我们证明系统有足够的可靠性,就可以采用用户众包建图的模式。”因为建图所用的传感器和Parking车上的传感器是一样的,同一台传感器既可以建图也可以运维。那么,针对不对外开放的私家停车场,用户就可以把车辆采集到的地图数据上传到云端,后台通过自动化生产流程做好测试验证,再下发到各个车端,构建自家所在的停车场。
这种策略理论上同时保证了高精地图的精度与鲜度,也印证了夏炎关于“规模化能力”的观点。在她看来,规模化是最关键的能力,其核心在于是否有自动化的方式能够进行低成本的复制。
在Momenta测试车上,整个建图过程中我们能够实时看到地图生成的模式,针对图上重复路径出现偏差的位置后期再进行算法补偿。相比不断叠加测试圈数的建图模式,夏炎认为这种高效自动化的能力是公司的核心储备。
车端与场端不一定要完全耦合
对比来看,停车场的覆盖率似乎并非方案规模化的最主要因素。“至于这件事,只要有足够的资金就可以快速实现。”
目前来看,Mpilot Parking的适用场景包括住宅、办公楼、商超、酒店以及共享出行等。
住宅和写字楼,是车主每天通勤的高频泊车场景,往往会有固定的停车位或经验轨迹;在商超、酒店、机场这类对泊车有高需求的公共场所,停车位不固定,需要系统能够实时探测车位,具备搜寻车位的能力,并判断车位占用信息。
在行业主流玩家眼中,整个停车系统不仅仅涉及到车端,还要进行场端和云端的关联改造。然而Momenta此次重点展示的内容仍旧停留在单车智能无需场端改造的技术能力。对此夏炎表示,在不同场景下,车端和场端的配合确实非常重要,尤其是商场等复杂情景,未来也将加入客户定制化需求。
“但这并不是说,一定要把二者耦合在一起。Momenta的做法是希望把每个模块打造到极致,才会提供冗余和解耦。今天发布的车端部分不排斥场端,只是不依赖于场端,这样可以为整个系统提供更好的冗余。”
事实上,Mpilot Parking在全国范围内的停车场进行测试,包括露天停车场。而这些场地均未经过场端改造,其所用的信息都在停车场标准体系之内。“只有不依赖场端,才能让方案适应更多的停车场。”
中国OEM对泊车产品需求较高
当然,无论是环境感知能力还是高精地图技术,都离不开深度学习作为功能实现的基础。
而Momenta在量产落地的过程中,最大的任务就是学习如何将深度学习运行在车端的嵌入式芯片上。相比服务器的运算能力,车规量产的芯片往往提供的算力资源有限。如何将多个深度学习模型压缩到一块算力有限的芯片上,同时又要满足精度要求,这非常考验团队工程优化能力。
Momenta打算从多个维度进行深度优化。首先,芯片上往往会有不同的计算单元,需要在这些计算单元上,将深度学习的网络层进行计算优化,如卷积等操作;其次,针对不同的任务类型,可以对模型结构进行自动搜索,产生高效率、高精度的模型;然后,对模型进行低比特量化操作,在保证模型精度不损失的同时,使得模型在芯片上发挥出极致性能;最后,根据特定芯片的特点,从算法角度可以研发更加芯片友好的网络和算法框架。
夏炎透露,公司内部研发和产品的思路是,把研发和工程相应地来做解构。“先不考虑芯片压缩,我们会在标准的平台上来做极致性能的研发,将其体验达到极致,并把极致的性能集成到量产芯片上。”
性能和快速工程化能力,是Momenta需要快速构建的能力。于是他们决定,在可量产的芯片上同时集成Parking和Highway两套产品。
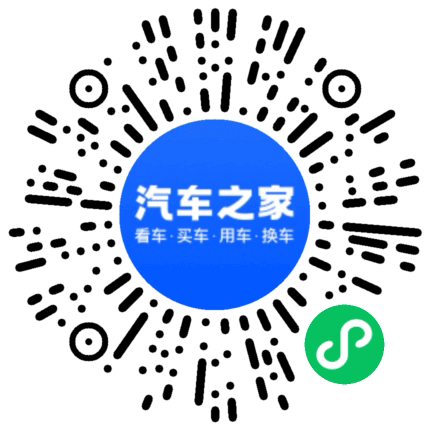
单就Parking而言,方案搭载了4台环视鱼眼摄像头、1台前视摄像头,12台超声波雷达,以及消费级IMU和GPS。整体来看,这套配置基本是当下高端车型的标配,也就是可量产的传感器组合。用夏炎的话来说:“其实这些元器件车企一看就懂,都是他们经常使用的传感器。”
而在车企眼中,这些好像远非决定性因素,他们的需求更多关于舒适性体验及核心安全性。从产业链角色来看,Momenta严守一个软件算法供应商的定位,也就是Tier 2。“博世、戴姆勒不是竞争对手,Tier1和OEM是我们的客户和合作伙伴。方案量产时间点是跟着客户走的,同时研发计划一定要超前于客户规划。”
以一个从业者的角度来看,夏炎认为中国OEM对泊车产品需求反而比较高,他们的时间表也就比较靠前。背后原因相当简单,据统计,在中国一线城市,有车族平均耗费15分钟进行一次停车行为,如果按照一天两次操作,那么在保证系统安全的前提下,驾驶员每天就可以节省30分钟,一年将节省至少150个小时,相当于18个工作日。
对于国际客户而言,由于其停车场问题没有本土这么突出,因此更多交流的是高速场景。基于此,整套Mpilot Parking虽然可以应对国际停车场,但公司现在重点仍旧希望能够先在中国市场解决中国的问题,再谈国际化。
终端用户的“双份体验”
回过头看,我们似乎并非第一次听到“Mpilot”这个属于Momenta的词汇。
早在3月,公司已对外展示面向高速场景的可量产自动驾驶解决方案Mpilot Highway后,此次也是Mpilot系列方案的第二次亮相。Momenta Mpilot是Momenta于今年3月发布的可量产自动驾驶解决方案,场景包括高速(Mpilot Highway)、泊车(Mpilot Parking)以及城市道路(Mpilot Urban)。
Mpilot方案整体基于一套标准的硬件计算平台:10个相机、12个超声波雷达、5个毫米波雷达,辅以其他传感器。也就是说,这样的一套硬件方案,可以同时支持不同场景的自动驾驶,如Mpilot Highway和Mpilot Parking。通过在不同场景下传感器和计算单元的分时复用,可以让终端用户获得「双份体验」,让主机厂客户实现「二合一」成本优化。
“对我们来说,自动驾驶级别不是最重要的。这项技术作为一个量产产品,我们希望能够为用户带来最大化的连续自动驾驶时长体验。”夏炎解释道。在这种整体方针引领下,公司的战略方向是量产自动驾驶与完全无人驾驶协同,应用场景覆盖高快速道路、停车场环境以及城市道路。
围绕量产自动驾驶与完全无人驾驶两条腿走路,Momenta通过数据、数据驱动算法和两者之间的迭代闭环,推动自动驾驶技术落地量产,并最终实现无人驾驶。

京ICP备09113703号-1
信息网络传播视听节目许可证: 0110553
广播电视节目制作经营许可证
公司名称:北京车之家信息技术有限公司
中央网信办违法和不良信息举报中心
违法和不良信息举报电话:400-868-5856
举报邮箱:jubao@autohome.com.cn