

完全通过数据驱动后,卓驭的驾驶辅助开悟了。
这并非一次寻常的OTA升级。用卓驭产品总监蒋卓键的话说,这是真正意义上的“100%端味”。在2024年10月做出“删库重练”的抉择后,卓驭团队跳过3.0版本,直升至端到端4.0,交出了一份完全由数据驱动、而非规则代码堆砌的答卷 。

★一场“重练”后的脱胎换骨
在过去很长一段时间里,市面上标榜“端到端”的系统,大多仍在决策链路深处藏着人类编写的规则代码作为“拐杖”。
它们像是拿着详尽说明书的新手司机,一旦遇到手册未记载的“鬼探头”或栅栏缺口,迟疑与顿挫便难以避免。而卓驭端到端4.0的核心逻辑变化,恰恰在于扔掉了这根拐杖。
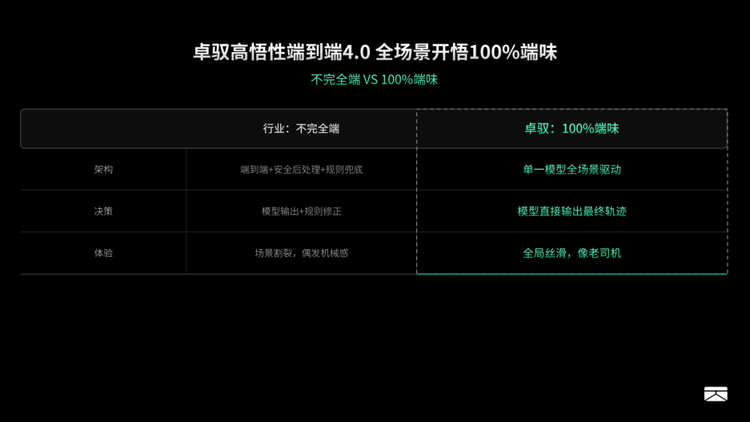
端到端4.0全力追求的是系统具备自主的“高悟性”,从感知到决策再到控制的完整链条中,人为预设的规则干预已归零 。这意味着车辆不再是被动执行“如果A、那么B”的指令,而是通过学习海量的优秀驾驶行为数据,在物理世界中自主理解通行逻辑与驾驶礼仪。

支撑这一能力的,是卓驭特色的“数据驱动体验闭环”双闭环模式:真实行车数据与仿真长尾场景不断清洗、投喂模型,而量产车回传的体验数据则形成反哺,“数据驱动”本身就能让移动智能跑出全新的上限,让套系统真正“越开越聪明” 。

★初试端到端4.0的“惊喜”与“遗憾”
这套系统的首次大规模量产落地,选择了红旗“司南智驾”。我们在深圳,简短地体验了一番,试驾车型为 红旗HS6 PHEV(参数|询价) 。硬件方面,卓驭惯导三目视觉系统作为主要感知,搭配中算力芯片平台。

体验上的惊喜,实实在在地源于控制逻辑。最直观的感受,流畅了很多,这种成熟感的主要来源是,之前那种偶发的“机械感”几乎消失了。
系统对“效率”的理解在升级,在面对被临停车占用的双向单车道时,车辆不再像以前那样走流程般地减速、等到、计算确认安全后,再启动避让绕行。而是能像经验丰富的老司机那样,精准地捕捉对向暂无来车的缝隙,果断借道绕行。

而在栅栏夹缝中绕行临停车,或是面对电单车流中突然探出的人影,系统的“本能防御”也相当老练,往往在人眼尚未察觉时,便已提前轻点减速,这种细腻的控车逻辑,确实是规则写不出来的。

然而,短暂的体验并非全是赞美诗。或许是出于“数据驱动”初期对安全的敬畏,又或许是训练样本中保守策略占比较高,系统在通过无信号灯路口时的博弈依然偏谨慎。

譬如减速等待行人通过之后,即便视野范围内已确认完全安全,系统的提速依然过于克制,从减速状态恢复到正常通行节奏的过程显得拖沓,一定程度上影响了通行效率。

此外,系统也偶发性地出现了变道规划时机偏晚的情况,在一个多车道分流的路口,就致使我们需要连续变换多车道。据卓驭技术人员解释,这与当前训练数据中“偏晚变道”样本占比较高有关,后续将通过数据迭代优化。
★智驾“普惠化”的竞速才刚刚开始
必须指出的是,我们此次体验的版本并非最终推送的正式版,其三点式掉头等功能的成功率目前也仍在打磨中。据官方消息,高悟性端到端4.0将于今年上半年通过OTA陆续推送给红旗HS6 PHEV、天工05等多款车型 。

在短暂的接触中,这套系统展现出的“老司机”质感,已足以让人对“数据驱动”的潜力刮目相看。但更值得关注的是,“范式的确定”带来的往往是量产落地的加速,2026年的智能辅助驾驶战场,体验与细节的打磨之外,重要KPI还包括“科技普惠”的落地效率。
竞争烈度在升级,主机厂如蔚来、小鹏、理想、吉利,供应商如地平线、元戎启行等玩家也在纷纷亮出基于VLA大模型的高性价比方案。我们会持续关注,谁能在这场极致优化的长跑中抢得领先身位。
本文作者为踢车帮 孙小树

京ICP备09113703号-1
信息网络传播视听节目许可证: 0110553
广播电视节目制作经营许可证
公司名称:北京车之家信息技术有限公司
中央网信办违法和不良信息举报中心
违法和不良信息举报电话:400-868-5856
举报邮箱:jubao@autohome.com.cn