

因为有个牛逼的老板强推 最后发现效果还不错!

先说结论:牛逼的技术都是最简洁的思路。世界道路就是为了人类视觉设计的 摄像头就是视觉 所以理论上只要人眼能处理的摄像头都能处理 现在某些处理不了只是因为神经网络还不够强大。特斯来纯视觉方案还是模拟人开车,类似人眼+大脑。用摄像头+算法 代替人处理大多数场景,处理不了的边角场景再交给人来处理。说白了就是脑子的问题不是眼睛不够的问题,脑子不够用人来补!特斯拉的想法是,道路是为人类设计的,人类使用基于视觉的系统--他们大脑中的自然神经网络来导航。最好尝试纯粹用摄像头和人工神经网络来复制,不要让雷达数据污染该系统。雷达数据和摄像头信号都是比特流,摄像头的信息量已经比雷达高上几个数量级,加入雷达实际上减少了信噪比。多么的简介如行云流水,硬件是累赘,砍掉还能降本,何乐而不为!

在智能网联汽车环境感知模块的技术路线:车辆感知外部环境的纯视觉技术路线是指不用超声波雷达、毫米波雷达、激光雷达,只依靠摄像头传感器来感知外部环境感知。
Tesla 研发了一套同样性能强大的视觉处理工具Tesla Vision。 Tesla Vision基于深度神经网络,能够对行车环境进行专业的解构分析,相比传统视觉处理技术可靠性更高。
前视宽视野、主视野、窄视野摄像头
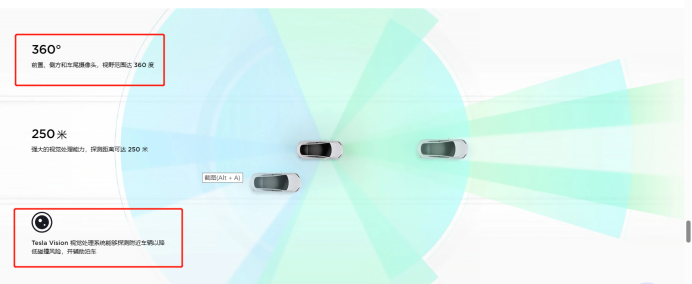
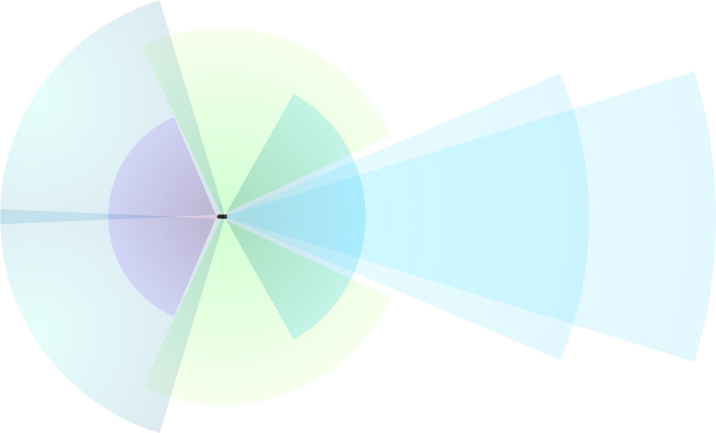
安装于挡风玻璃后的的三个摄像头,兼顾了车辆前方的宽阔视角以及远距离物体精准探测。
宽视野
120 度鱼眼镜头能够拍摄到交通信号灯、行驶路径上的障碍物和距离较近的物体,非常适用于城市街道、低速缓行的交通场景。
主视野
覆盖大部分交通场景。
窄视野
能够清晰地拍摄到远距离物体,适用于高速行驶的交通场景。
侧方前视摄像头
90 度角侧方前视摄像头能够监测到高速公路上突然并入当前车道的车辆,在进入视野受限的交叉路口时也可提供更多的安全保障。
侧方后视摄像头
监测车辆两侧的后方盲区,在变道和汇入高速公路时起着重要作用。
后视摄像头
除了辅助驾驶员安全倒车之外,拥有更佳光学效果的后视摄像头现在也是自动辅助驾驶硬件套装的新成员,将应用于复杂泊车场景。
运算能力提升 40 倍
摄像头收集到的大量数据会通过我们的第三代车载电脑进行处理,其运算能力相比上一代提升了 40 倍。车载电脑上运行着 Tesla 自主研发的神经网络系统,这是我们训练和开发 Autopilot 自动辅助驾驶的基础。这套系统可以同时”看"到每一个方向,其探测范围远超人类的感官,提供了一幅驾驶员自身无法触及的世界影像。
Tesla Vision的过渡意味着在自动驾驶系统中只使用基于摄像头的计算机视觉,而不是同时来自摄像头和雷达的输入。你会认为更多的数据会更好,但特斯拉的想法是,道路是为人类设计的,人类使用基于视觉的系统--他们大脑中的自然神经网络来导航。最好尝试纯粹用摄像头和人工神经网络来复制,不要让雷达数据污染该系统。雷达数据和摄像头信号都是比特流,摄像头的信息量已经比雷达高上几个数量级,加入雷达实际上减少了信噪比。牛逼的技术都是最简洁的思路:世界道路就是为了人类视觉设计的 摄像头就是视觉 所以理论上只要人眼能处理的摄像头都能处理 现在某些处理不了只是因为神经网络还不够强大。特斯来纯视觉方案还是模拟人开车,类似人眼+大脑。用摄像头+算法 代替人处理大多数场景,处理不了的边角场景再交给人来处理。说白了就是脑子的问题不是眼睛不够的问题,脑子不够用人来补!
特斯拉用纯视觉+自然神经网络来替换掉雷达 也是经过数据测试的。在模拟系统里不断运行以提高神经网络的能力,从而最终可以取消掉雷达。
然而马斯克曾经说过,毫米波雷达也不是不行,高分辨率的其实可以胜过纯视觉方案。
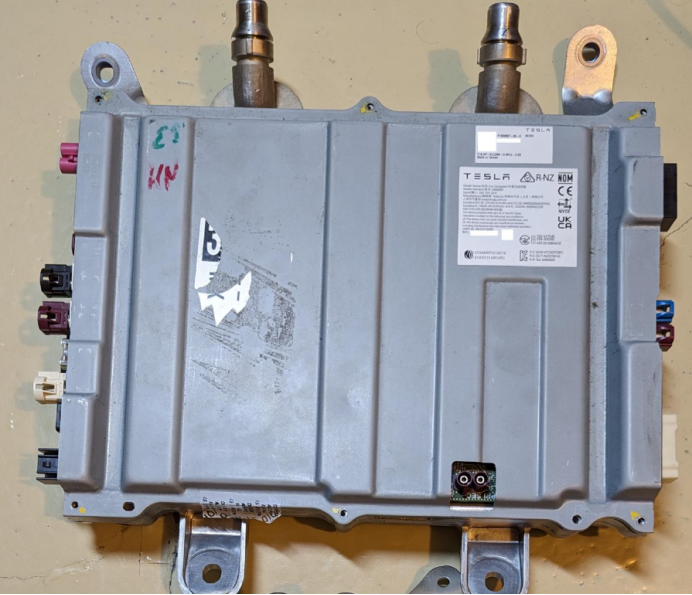
从拆解北美Model X HW4.0硬件可以看出:留了一个Phoenix毫米波雷达接口+雷达加热器,据传闻,特斯拉将会加入一颗4D毫米波雷达。Model Y 车型上依然不会带有毫米波雷达,表明特斯拉摄像头+高分辨率的毫米波雷达也会采用。

京ICP备09113703号-1
信息网络传播视听节目许可证: 0110553
广播电视节目制作经营许可证
公司名称:北京车之家信息技术有限公司
中央网信办违法和不良信息举报中心
违法和不良信息举报电话:400-868-5856
举报邮箱:jubao@autohome.com.cn